Canadian robot’s lunar equipment handling capabilities for astronauts.
A New Challenge on the Lunar Surface
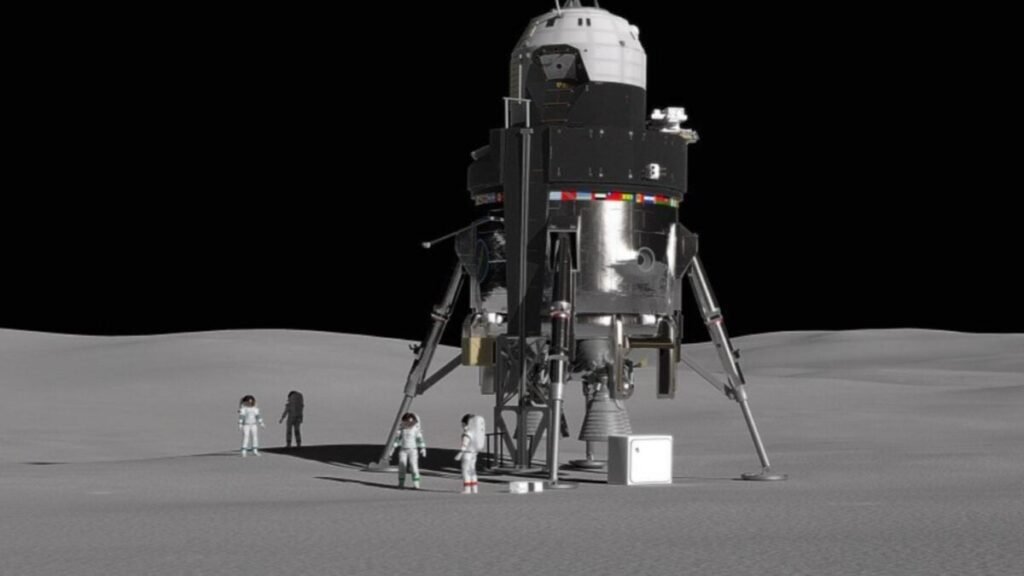
Transporting materials, equipment, and supplies will be one of the most complex tasks for upcoming human missions to the Moon. To tackle this challenge, researchers at the University of Toronto are developing an autonomous navigation technology that could become an essential piece of future lunar logistics.
The system, conceived by Professor Tim Barfoot and PhD student Alec Krawciw, is part of a collaboration with MDA Space and the Canadian Space Agency (CSA). Their goal is to create a lunar utility vehicle capable of transporting cargo between strategic points of a lunar base completely autonomously.
“Teach and Repeat”: The System that Learns Lunar Routes
Unlike exploration rovers designed to traverse unknown terrain, the new vehicle will perform repetitive journeys between fixed locations. To do this, the Canadian team developed a navigation system called “teach-and-repeat.”

The method allows the rover to learn a route through initial manual or semi-autonomous driving. Once the route is learned, it can automatically repeat it as many times as necessary, even in changing lighting and terrain conditions.
“Automating this part of the mission saves time and energy for astronauts, reduces their exposure to harsh lunar conditions, and improves the overall productivity of the operation,” explains Barfoot. The idea is for astronauts to focus on scientific research while the robot takes care of heavy logistical tasks.
From Theory to Field: Testing in a Simulated Martian Environment
As part of his PhD, Alec Krawciw adapted the autonomous driving system to the Lunar Exploration Light Rover (LELR), a CSA test vehicle. In December 2024, the team participated in a field trial at the agency’s facilities in Montreal, where terrain with similar relief and dust to Mars allowed…
“Simulating lunar conditions introduced a five-second delay between the command and the vehicle’s response,” Krawciw recounts. “That forced us to develop a new semi-autonomous mode with short paths. It was a completely new experience.”
The result was successful: the rover completed its journeys without human intervention and managed to repeat routes with great precision. “Seeing something that was born in the laboratory come to life in a real mission environment was incredible,” adds the researcher.
Technical Analysis in Trading
Source:
Source:
Source:





